The aim of this paper is to describe a new optimization method that can create control equations of general regulators. For this type of optimization a new method was created and we call it Two-Level Transplant Evolution (TLTE). This method allowed us to apply advanced methods of optimization, for example direct tree reducing of tree structure of control equation. The reduction method was named Arithmetic Tree Reducing (ART). For the optimization of control equations of general controllers it is suitable to combine two evolutionary algorithms. The main goal in the first level of TLTE is the optimization of the structure of general controllers. In the second level of TLTE the concrete parameters are optimized and the unknown abstract parameters in the structure of equations are set. The method TLTE was created by the combination of the Transplant Evolution method (TE) and the Differential Evolution method (DE). The Transplant Evolution (TE) optimizes the structure of the solution with unknown abstract parameters and the DE optimizes the parameters in this structure. The parameters are real numbers. The real numbers are not easy to find directly in TE without DE. Some new methods for evaluation of the quality of the found control equation are described here, which allow us evaluate their quality. These can be used in the case when the simulation of the control process cannot be finished. Some practical applications are shown in the results. In all calculation of TLTE the control equation had a better quality of the control process, than the classical PSD controllers and Takahashi`s modification of the PSD controller.
Transplant Evolution
Transplant Evolution (TE) was inspired by biological transplantation. It is an analogy to the transplant surgery of organs. Every transplanted organ was created by DNA information but some parts of an ill body can be replaced by a new organ from the database of organs. The description parts of individual (organs) in the database are not stored on the level DNA (genotype). In Transplant Evolution (TE) every individual part (organ) is created by the translation of grammar rules similar to Grammatical Evolution (GE), but Transplant Evolution (TE) does not store the genotype and the grammatical rules are chosen randomly. The newly created structure is stored only as a tree. This is like Genetic Programming (GP). The Transplant Evolution algorithm (TE) combines the best properties of Genetic Programming (GP) [2] and Grammatical Evolution (GE) [4]. The Two-Level Transplant
Evolution (TLTE) in addition to that uses the Differential Evolution algorithm (DE).
Optimization of the numerical parameters of general controllers in recurrent control equations of general controllers is a very difficult problem. We applied the second level of optimization by the Differential Evolution method (DE). The individuals in TE and TLTE are represented only by a phenotype in the shape of an object tree. During the initialization of population and during the creation of these phenotypes, similar methods are used as in GE. In Grammatical Evolution the numerically represented chromosomes are used. The codons of these chromosomes are used for the selection of some rule from a set of rules. In Transplant Evolution the chromosomes and codons are not used, but for the selection of some rule from a set of rules randomly generated numbers are used. These numbers are not stored in the individual chromosome. The new individuals in the population are created with the use of analytic and generative grammar and by using crossover and mutation operators. These operators are projected for work with the phenotype of an individual, similarly as in GP. Because the individuals of TE and TLTE are represented only by phenotype, it was possible to implement these? advanced methods in the course of evolution:
• an effective change of the rules in the course of evolution, without the loss of generated solutions,
• a difference of probability in the selection of rules from the set of rules and the possibility of this changing
during the evolutionary process,
• the possibility of using methods of direct reduction of the tree using algebraic operations,
• there is a possible to insert some solutions into the population, in the form of an inline entry of phenotype
(for example: Uk-1 + Ek + Ek- 1 * num),
• new methods of crossover are possible to use, (for example crossover by linking trees)
• etc.
Initialization of individual
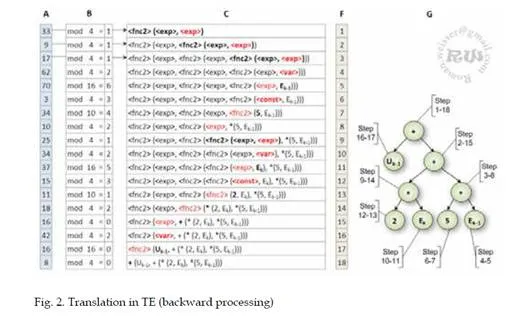
During the initialization, the generative grammar rules are used. These rules are selected randomly from the set of rules by the following equation:
rule = random(0,maxInt)%rules_count
(1) Where: random is a pseudo-random number generator, maxInt is a high number, % is the remainder operator (modulus), and rules_count denotes the number of possible rules to transcribe a given non-terminal symbol. The algorithm TE which is described by equation 1 differs by the way of initialization of individual in Grammatical Evolution (GE).The Original initialization algorithm GE uses forward processing of grammatical rules. In the Grammatical Evolution the method of crossover and mutation are made on the genotype level. The phenotype is created by a later translation of this genotype. This way of mutation and crossover does not allow the using of advanced method in crossover and mutation operators, which does not destruct the already created parts of the individual (O’Neill M. and Ryan C., 2003). During the evolution of this algorithm the Backward Processing of Rules (BPR) arose (Popelka, O., 2007). The BPR method uses gene marking. This approach has the hidden knowledge of tree structure. Due to the BPR the advanced and effective methods of crossover and mutation can be used. Anyhow the BPR method has some disadvantages. Due to these disadvantages the new


Crossover
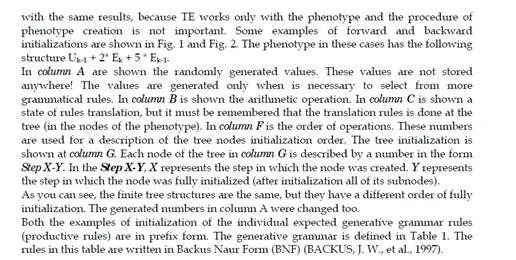
The crossover is a distinctive tool for genetic algorithms and is one of the methods in evolutionary algorithms that are able to acquire a new population of individuals. The crossover is realized in a similar way as in Genetic Programming (GP) [2].
The TE uses three types of crossover. The first type of crossover is named crossover the parts of trees, the second type is named crossover of nodes, and the third type is named crossover by linking trees. The nodes or subparts of trees in the individuals for crossover are selected randomly.
In the case of the method crossover of nodes it is neccessary to keep change of the same types of nodes. This request is possible to express by this relationship:


Mutation
Mutation is the second operator to obtain new individuals. This operator can add new structures, which are not included in the population so far. Mutation is performed on individuals from the old population. The nodes in the individuals for mutation are selected randomly. The mutation operator can be subdivided into two types. The first type of mutation is non-structural mutation and second type is structural mutation. Structural mutation can be divided into shortening structural mutation and extending structural mutation. The mutation operator uses analytic grammar and generative grammar rules.
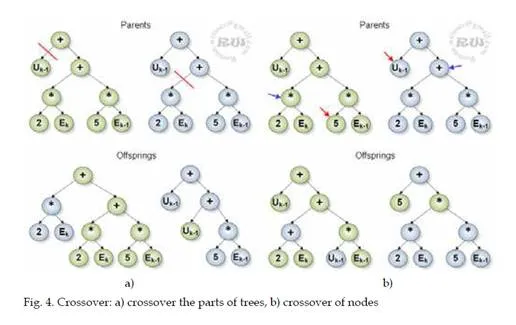
Non-structural mutation does not affect the structure of the already generated individual. In the individual that is selected for mutation, the chosen nodes of the object sub-tree are further subjected to mutation. The mutation will randomly change the chosen nodes, whereas the used grammar is respected. For example it means that the mutated node, which is a function of two variables (i.e. + – × ÷) cannot be changed by the node representing the function of one variable (unary minus, etc.) or only a variable (Ek, etc.), etc. See Fig. 6.
The selected node in the tree G1 is marked by an orange color (or a different level of gray).The tree after mutation is marked G2 and the mutated node is marked an orange color (or different level of gray) too. The mutation was made by the using of generative and analytic grammar. The operations with this grammar are marked in columns A, B, C, and F. The randomly generated value for rule selection are shown in column A. The modulus operations are shown in column B. The processing of rules is shown in column C.
This example assumes the generative grammar rules in Table 1 and the analytic grammar rules in Table 2.
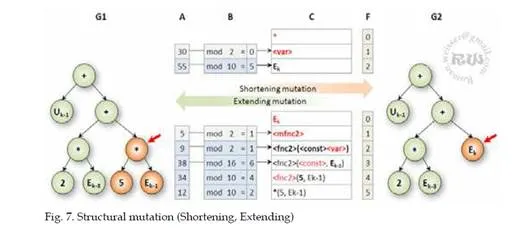
Structural mutations, unlike non-structural mutations, affect the tree structure of individuals. Changes of the sub-tree by extending or shortening its parts depend on the method of structural mutations. Structural mutation can be divided into two types: Structural mutation which is extending an object tree structure and structural mutation which is shortening a tree structure. In the case of the extending structural mutation, a randomly selected node is replaced by a part of the newly created sub-tree that respects the rules of the defined grammar (see Fig. 7). Conversely the shortening structural mutation replaces a randomly selected node of the tree, including its child nodes, by a node which is described by a terminal symbol (i.e. a variable or a number). This type of mutation can be regarded as a method of indirectly reducing the complexity of the object tree (see Fig. 7).

Architecture
From the implementation viewpoint, the joining of the two evolutionary algorithms is the most difficult process. For the best flexibility the interconnecting of three separate computational modules that are join by an interlayer were chosen. The interlayer mediates a communication among the modules and prepares data in the required form. With this implementation it is possible to use each module separately for another optimization problem, or similarly to change some module by another module.
Transplant Evolution Module
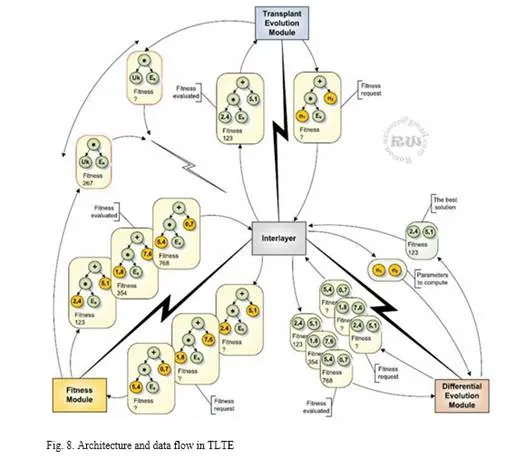
The transplant Evolution Module (MTE), see Fig. 8 ensures optimization of the structure of controllers. The principle of this algorithm was described in the article TLTE. Its task is to create a population of individuals which uses generative grammar G and analytic grammar G-1. This module can make a numerical optimization of parameters in the structure solutions too, but the quality is not so good as in the case of the two-level structure. Optimization of the parameters is provided by the Differential Evolution Module (MDE). The agent for the communication between these layers is the Interlayer, which is responsible for preparing the data in the desired form for each module.The input parameters for the MTE are the generative grammar rules P and the analytic grammar rules P-1, which leads to the evolution of individuals (solutions). The output parameter of the MTE is a fully optimized solution that includes both the appropriate structure, and its parameters.
Differential Evolution Module
The Differential Evolution Module (MDE), see Fig. 8 ensures the optimization of abstract parameters in the structure of the individual. The principle function of Differential Evolution![]() (DE) is explained for exiaimi ifple in [4]. This module is activated by the Interlayer, which gives it the vector of variables num= (num1 ,…,numn ) as one of the input parameters. The number of parameters of this vector is equal to the number of variables, which was included in the structure of the solutions that came from the MTE. The output parameter MDE is the optimized vector of parameters that is sent into the Interlayer.
(DE) is explained for exiaimi ifple in [4]. This module is activated by the Interlayer, which gives it the vector of variables num= (num1 ,…,numn ) as one of the input parameters. The number of parameters of this vector is equal to the number of variables, which was included in the structure of the solutions that came from the MTE. The output parameter MDE is the optimized vector of parameters that is sent into the Interlayer.
Fitness Module
The fitness Module (FM), see Fig. 8, provides an evaluation of the models. The model is some structure of the solutions, including some parameters. This model, together with the controlled system is the input of simulation. For a given controller and controlled system, the simulation of regulation is started. The quality of model is included in the fitness function after the finishing of the simulation. The evaluated model is send to the Interlayer.
Interlayer
The Interlayer, see Fig. 8 is the most important part in the whole architecture of Two-Level architecture. The Interlayer is the main module, which holds instances of all the computational modules. The interlayer provides communication among the computational modules through the communication interface. This module contains the knowledge about the strategy of optimization so this means what to be optimized and how to optimize it. The interlayer controls the parameters of all the computational modules (MTE, MDE, and FM), for example: size of populations TE or DE, number of generations, type of selection methods, set of probability of crossover and mutation, etc. The interlayer makes the communication with an Output Module (OM). The OM is a graphical output, which shows the evolution outputs, simulation of control outputs, etc. The most important task of the interlayer is data preparation in the correct form during the communication among the computational modules, for example during the request for fitness evaluation, see Fig. 8. From this perspective, the tasks can be divided as follows:
• To create the vector of symbolic variables for MDE during the communication with MTE.
• The abstract variables will be set by concrete optimized parameters in abstract variables after the finishing of the optimization.
• To send a full model of the solution (structure + parameters) to the FM, during the request of the MTE for the calculation of the quality of an individual, which does not include any abstract parameter.
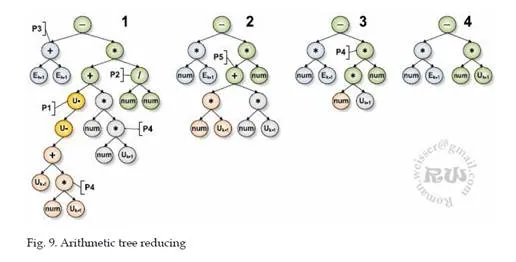
Arithmetic tree reducing
By penalizing the part of the individual fitness which contains a complex object tree, the method of targeted shortening structural mutation of individual, or the direct shortening of the tree using algebraic adjustments – Algebraic Reducing Tree (ART).
• By penalizing the part of the individual fitness which contains a complex object tree,
• Method of targeted shortening structural mutation of individual,
• The direct shortening of the tree using algebraic adjustments – Algebraic Reducing Tree (ART).
The last-mentioned method can be realized by the TE, where all of the individuals do not contain the genotype, and then a change in the phenotype is not affected by treatment with the genotype. The realization of the above mentioned problem with an individual, which uses the genotype would be in this case very difficult. This new method is based on the algebraic arrangement of the tree features that are intended to reduce the number of functional blocks in the body of individuals (such as repeating blocks “unary minus”, etc.).
In view of the object tree complexity of the individual and also for the subsequent crossover it is preferable to have a function in the form of x = 3 × a, rather than x = a + a + a, or more generally x = n × A. Another example is the shortening of the function x = – (- a), where the form x = a is preferable (it is removing the redundant marks in the object tree individual). The introduction of algebraic modifications of the individual phenotype leads to a shorter result of the optimal solution and consequently to a shorter presentation of the individual and the shortening of the time of calculation of the function that is represented in the object tree and also to finding optimal solutions faster because of the higher probability of crossover in the suitable points with a higher probability to produce meaningful solutions. The essential difference stems from the use of the direct contraction of trees, which leads to a significantly shorter resulting structure than without using this method. The arithmetic tree reducing method is shown on Fig. 9. The tree on the beginning of the process of ART is shown under the number 1, the resulting tree after the use of ART is shown under number 4.