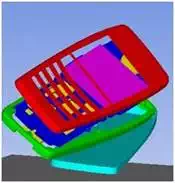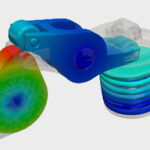

Have you needed to run a structural analysis of a design subject to high energy dynamic conditions? These are typically impact or shock simulations such as automobile crash, drop tests of electronic devices, bird strikes on turbine blades, or structures subjected to shock or blast loads. There may be a number of reasons for running these explicit dynamics simulations, but typically they are used to gain insight into the potential damage caused by the dynamic event. For example, they can be used to predict if a laptop cover will break when dropped from 4 feet or if a metal fragment traveling at 600 feet per second will break through a pair of safety goggles.
From an analysis standpoint, modeling these types of events can be very difficult. They often involve highly nonlinear behaviors such as sliding contact, friction, material plasticity, or buckling, which often cause numerical convergence problems. It’s also very difficult to simulate the propagation and interaction of stress waves which can be very important in high energy events.
One approach to this type of transient dynamic simulation is to run a traditional implicit analysis. This type of analysis, which is used by the majority of commercial finite element codes, uses an implicit time integration scheme. This scheme can use relatively large time steps but may require many convergence iterations for highly nonlinear behaviors (large strains, contact, sliding, material plasticity, etc.). It also requires matrix decomposition at each iteration, which can be very time-consuming. Another drawback to this scheme is that it is not very accurate for simulating stress wave propagation.
Another approach to simulating high energy transient events is to use an explicit method. This method is named for its explicit time integration scheme in which the matrices are not inverted and are updated only at the end of each time step. It uses very small time steps, on the order of 1.e-6 to 1.e-8 seconds depending on the model, to simulate stress wave propagation and to eliminate the need for costly convergence iterations. So, unlike the implicit method, each time step solves very quickly but many thousands of time steps are typically required to complete the solution. The small time step requirement generally limits its use to short duration events, typically on the order of milliseconds or less, but time-scaling methods can be used to solve longer events.
By avoiding convergence checks and using such small time steps, the explicit method avoids most of the limitations of the implicit method for high energy dynamic analysis. It can accurately simulate the propagation and interaction of stress waves caused by shocks or impacts, and it can solve highly nonlinear and structurally unstable problems that often cannot be solved with implicit methods due to convergence difficulties.
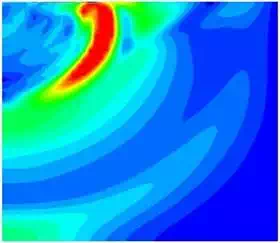 Stress Wave Propagation through a Metal Block Stress Wave Propagation through a Metal Block |
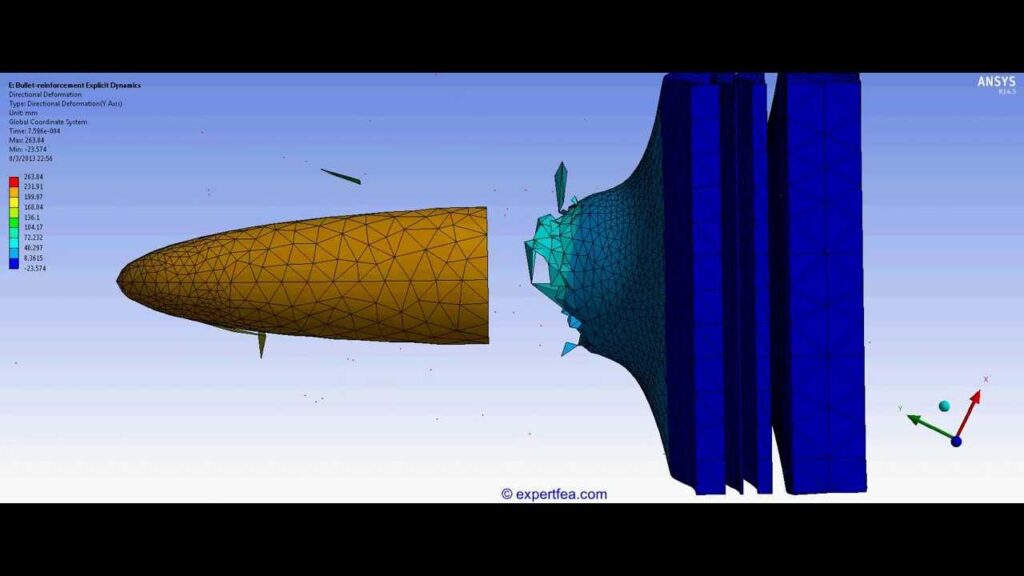
The explicit method is used by commercial finite element codes like LS-Dyna, AUTODYN, and ANSYS/Explicit. These codes have been used to solve some highly complex dynamic analyses for a wide range of commercial and military applications. Some examples include ice impact on turbine blades, blast load on reinforced concrete structures, vehicle-barrier crash, bullet-target impacts, cell phone drop tests, power tool drop tests, IED blast, and golf club-ball impacts. Additional examples with more detail can be found under explicit dynamics case studies.