When one of the links of a kinematic chain is fixed, the chain is known as mechanism. A mechanism with four links is known as simple mechanism, and the mechanism with more than four links is known as compound mechanism. When a mechanism is required to transmit power or to do some particular type of work, it then becomes a machine.
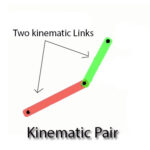
A mechanism is a constrained kinematic chain. This means that the motion of any one link in the kinematic chain will give a definite and predictable motion relative to each of the others. Usually one of the links of the kinematic chain is fixed in a mechanism.
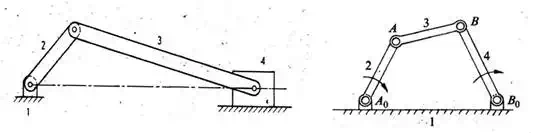
Slider crank and four bar mechanisms.
Number of degrees of freedom for plane mechanism
Degrees of freedom/mobility of a mechanism: The number of independent inputparameters (or pair variables) that are needed to determine the position of all the links of the mechanism with respect to the fixed link is termed its degrees of freedom.
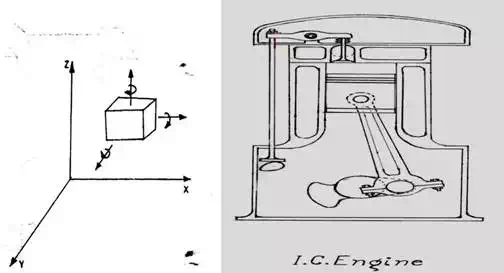
Degrees of freedom (DOF) is the number of independent coordinates required to describe the position of a body in space. A free body in space can have six degrees of freedom. I.e., linear positions along x, y and z axes and rotational/angular positions with respect to x, y and z axes. In a kinematic pair, depending on the constraints imposed on the motion, the links may loose some of the six degrees of freedom.
Planar mechanisms: When all the links of a mechanism have plane motion, it is calledas a planar mechanism. All the links in a planar mechanism move in planes parallel to the reference plane.
Serial Mechanisms (Manipulators): Early manipulators were work holding devices inmanufacturing operations so that the work piece could be manipulated or brought to different orientations with respect to the tool head. Welding robots of the auto industry and assembly robots of IC manufacture are examples.
Application of kutzbach criterion to Plane mechanisms


F = 3 (n–1) – 2l – h
Where n=number of links; l= number of lower joints (or) pairs and h= number of higher
pairs (or) joints
This is called the Kutzbach criterion for the mobility of a planar mechanism.