
The links in a mechanism are mostly connected by means of pin joints. The rubbing velocity is defined as the algebraic sum between the angular velocities of the two links which are connected by pin joints, multiplied by the radius of the pin.
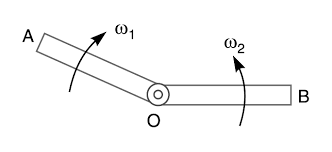
Consider two links OA and OB connected by a pin joint at O as shown in Fig. Let
ω1 = Angular velocity of the link OA or the angular velocity of the point A with respect to O
ω2 = Angular velocity of the link OB or the angular velocity of the point B with respect to O, and r = Radius of the pin.
According to the definition,
Rubbing velocity at the pin joint O is given by the formula
=(ω1-ω2)*r , if the links move in the same direction
= (ω1+ω2)*r, if the links move in the opposite direction where ω1 = angular velocity of link 1
ω2 = angular velocity of link 2 r = radius of the pin
Note : When the pin connects one sliding member and the other turning member, the angularvelocity of the sliding member is zero. In such cases,
Rubbing velocity at the pin joint = ωr
where ω=Angular velocity of the turning member, and r = Radius of the pin.