Synthetic Aperture Radar (SAR) systems are all-weather, night and day, imaging systems. Automatic interpretation of information in SAR images is very difficult because SAR images are affected by a noise-like characteristic called speckle that arises from an imaging device and strongly data and makes automatic image interpretation very difficult. The speckle noise in SAR images can be removed using an image restoration technique called despeckling. The goal of despeckling is to remove speckle-noise from SAR images and to preserve all image’s textural features. The statistical modeling of SAR images has been intensively investigated over recent years. In statistical image processing an image can be viewed as the realization of a joint probability density function. Since joint probability functions have analytical forms and few unknown parameters usually, the efficiency of the denoising algorithm depends on how well the chosen model approximates real data.
The wavelet Daubechies (1992) based despeckling algorithms are proposed in Dai et al. (2004), Argenti et al. (2006), Foucher et al. (2001). The second-generation wavelets like Contourlet Chuna et al. (2006) have appeared over the past few years. Despeckling using Contourlet transform Li et al. (2006) and Bandelet Sveinsson & Benediktsson (2007) transforms show superior despeckling results for SAR images compared with the wavelet based methods. Model based despeckling mainly depends on the chosen models. Bayesian methods have been commonly used as denoising methods, where the prior, posterior and evidence probability density functions are modeled. The image and noise models in the wavelet domain are well- defined using the results in Argenti et al. (2006), Gleich & Datcu (2007) and the noise free image is estimated using a MAP estimate. The speckle noise in the SAR images is considered as a multiplicative noise Walessa & Datcu (2000), and can be also presented as a signal- dependent additive noise Argenti et al. (2006). The log transformed image is modeled using zero location Cauchy and zero-mean Gaussian distributions in order to develop minimum means absolute error estimator, and maximum a posteriori estimator. This paper presents the state-of the art methods for information extraction and their comparison in efficiency of despeckling and information extraction. This paper presents three methods for despeckling and information extraction. The first method is wavelet-based despeckling and information extraction method using the General Gauss-Markov Random Field (GGMRF) and Bayesian inference of first and second order. The second and third methods use the GMRF and Auto- binomial model with the Bayesian inference of first and second order. The despeckling performance is compared and the texture parameters estimation is presented.
Synthetic Aperture Radar System
The Synthetic Aperture Radar systems are all weather, day and night monitoring systems, which use the electromagnetic radiation for image retrieval. SAR is one of the most advanced engineering inventions systems in the last decade. Specific radar systems are imaging radars, such as side looking SAR and SAR. Practical restriction to the length of the antenna resulted in very coarse resolution in the flight direction. Using a fixed antenna, illuminating a strip or swath to the sensor’s ground track, resulted in the concept of stripping mapping. Modern phased-array antennas are able to perform even more sophisticated data collections strategies, as ScanSAR, spotlight SAR, but the strip map mode is the most applied mode on current satellites [1]. The concept of using frequency (phase) information in the radar signal’s along-track spectrum to discriminate two scatters within the antenna beam goes back to 1951 (Carl Wiley). The key factor is coherent radar,, where the phase and amplitude are received and preserved for later processing., but long antenna was required. The early SAR systems were based on optical processing of the measured echoed signal using the Fresnel approximation for image formation and are known as range-Doppler Imaging or polar format processing. The experience on airborne SAR systems in 60’s and 70’s culminated in L-band SAR system Seasat, a satellite launched in June 1978, primarily for ocean studies, the live time was 100 days, but the imaginary was spectacular, highlighting if geologic information and ocean topography information. Since 1981 Shuttle missions carried SAR systems. The first instrument was the Shuttle Imaging radar SIR laboratory and operated for 2.5 days. An improved version of SIRA orbited the Earth in 1984 and was able to steer the antenna mechanically to enable different angels. Cosmos 1870 was the first S-band SAR satellite of former Soviet Union, launched in 1987 and orbited at a height of 270 km and operated for 2 years, ALMAZ-1 was the second satellite launched in 1991 and operated for 1.5 years. First European Remote Sensing Satellite ERS-1 was operational in 1991 and operated until March 2000. Japan started space- borne SAR program in 1992 with JERS in 1992, SIR-C/X-SAR was developed by JPL, DLR and ASI operated with C, L and X band. Canadian Space Agency lunched Radarsat in 1995. A SRTM (Shuttle Radar Topography mission) was carried out between 11 and 23 February 2000. In last decade many other satellites with SAR were lunched: Radarsat-2, ENVISAT, TerraSAR-X, Tandem-X, ALOS, Cosmo-Skymed, SAR lupe and forth coming constellation of Sentinel satellites.
Principles of SAR
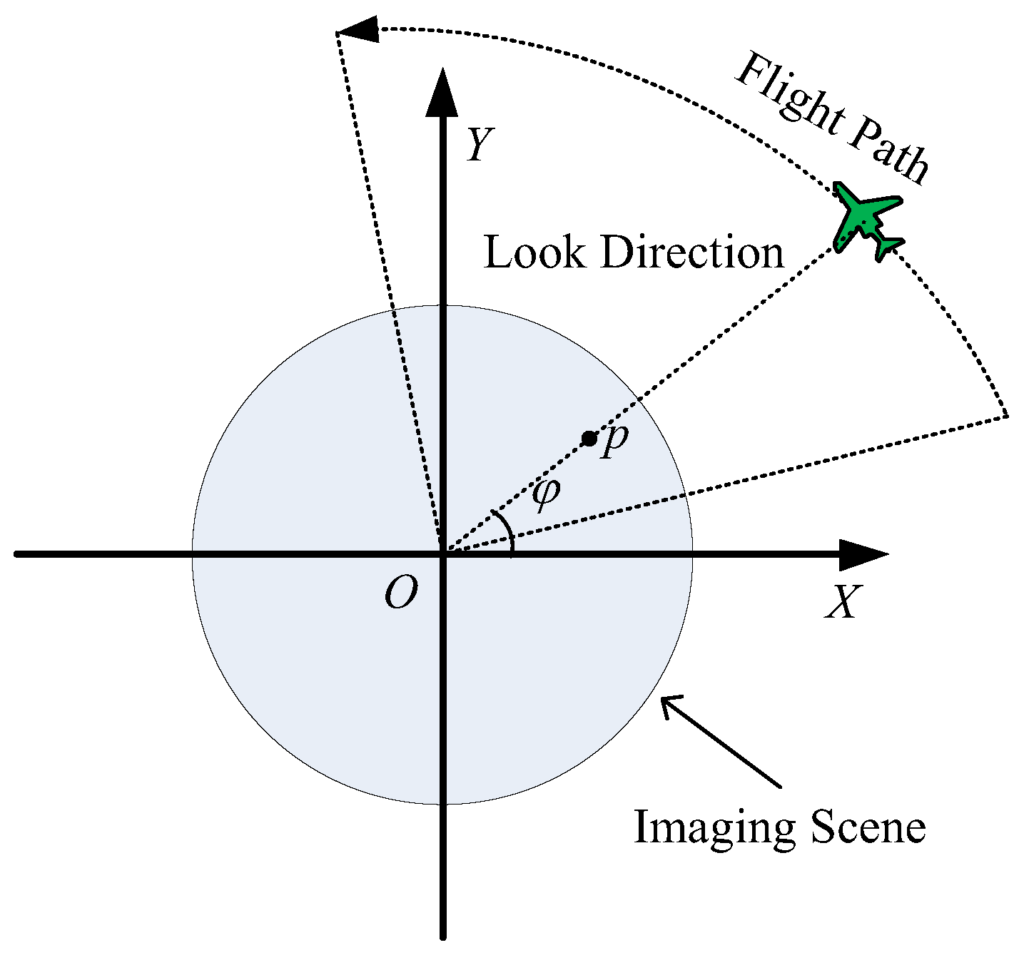
The central idea of SAR processing is based upon matched filtering of the received signal in both the range and azimuth directions. Matched filtering is possible because the acquired SAR data are modulated in these directions with appropriate phase functions. The modulation in range is provided by the phase encoding of transmitted pulse, while the modulation in azimuth is created by the motion in the signal. The point targets are arrayed in a Cartesian type Coordinate system space defined by range, azimuth, and altitude as analogs of x, y and z directions. The altitude direction is omitted in the two-dimensional simulation. The platform in this simulation is an antenna attached to a plane traveling at an orbital velocity, along the azimuth direction and at the midpoint in the flight, the distance to the target equals the range of closest approach or minimum range to target. As an satellite platform is used in the simulation, the curvature of the earth is considered negligible and the orbital velocity is approximately equal to the platform velocity. The transmitted radar signal, x(t), is assumed to be a chirp pulse (linearly frequency modulated signal) given by




areas on the earth’s surface in the same range but in different azimuth, are located on the same azimuth frequency. So, when this frequency is adjusted, the whole target areas with the same frequency (which means in the same range) are adjusted. RDA uses the large difference in time scale of range and azimuth data and approximately separates processing in these two directions using Range Cell Migration Correction (RCMC). RCMC is the most important part of this algorithm. RCMC is performed in range frequency and azimuth frequency domain. Since, azimuth frequency is affected by Doppler Effect and azimuth frequency is bonded with Doppler frequency, it is called Range Doppler Algorithm. RDA can be implemented in three different ways. But they all have similar steps and their difference is only in Secondary Range Compression (SRC). The main steps of RDA are: 1- Range compression 2- Azimuth FFT (transform to range Doppler domain) 3- RCMC 4- Azimuth filtering 5- Inverse FFT (return to range azimuth time domain) 6- Image formation. Range compression is implemented using matched filter. The filter is generated by taking the complex conjugate if the FFT of the zero padded pulse replica, where the zeros are added to the end of the replica array. The output of the range matched filter is the inverse transform between range Fourier transformed raw data and the frequency domain matched filter. Each azimuth signal is Fourier transformed via an azimuth FFT and RCMC is performed before azimuth matched filtering in the range-Doppler domain. After azimuth matched filtering of each signal and azimuth inverse fast Fourier transforms (IFFTs), the final target image is obtained. Fig. 2 shows, real and imaginary part of the received signal, The simulated raw data and its real part and phase are shown in Fig. 3. Fig.4 shows the process of range compression with RCMC and its phase


Image and speckle models
SAR images are affected by a noise-like characteristic called speckle that affects all coherent imaging systems and, therefore, can be observed in laser, acoustic and radar images. Basically, this usually disturbing effect is caused by random interferences, either constructive or destructive, between the electromagnetic waves which are reflected from different scatterers present in the imaged area. SAR images appear to be affected by a granular and rather strong noise named speckle. Speckle becomes visible only in the detected amplitude or intensity signal. The complex signal by itself is distorted by thermal noise and signal processing induced effects only. As a consequence of the speckle phenomenon, the interpretation of detected SAR images is highly disturbed and cannot be done with standard tools developed for non-coherent imagery. Magnitude and phase of the scatterers are statistically independent, allowing to obtain the received signal by a simple summation of the individual contributions. Interactions between scatterers are neglected.The phase of the scatterers is uniformly distributed between 0 and 2π, i.e. speckle is assumed to be fully developed.
SAR image statistics
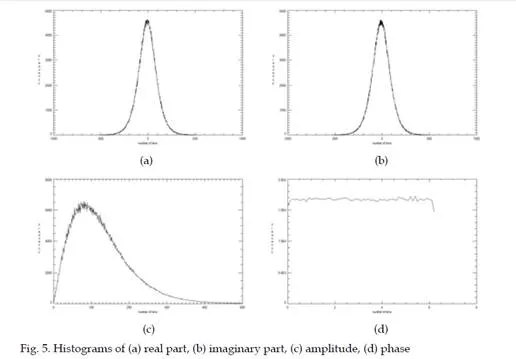
The SAR image is a complex image, where the real and imaginary part have Gaussian distribution, with zero mean and its real and theoretical distributions are shown in Fig. 5(a) and 5(b). The amplitude of the SAR image is obtained using the absolute value and can be modeled using Gamma distribution

they are able to statistically describe correlations, or even more generally, any kind of statistical dependence between neighboring pixels. Furthermore, they are easily applicable within the Bayesian framework. Originating from statistical physics, where they have been used for the study of phase transitions, they are now widely employed to model two- dimensional lattices, such as image data. In the beginning, the use of Markov models in image processing was limited due to the constraint of causality, but after a solution to this problem had been found, they quickly became one of the standard image processing tools. The information of digital images is not only encapsulated in gray-values of individual pixels. More than that, images are usually composed of different regions and features with similar statistical properties, such as textures, lines and contours. As of this, several independently considered pixels usually are not significant to describe all information of a certain image region, but become important by their relations and interactions with pixels in a neighborhood. The characteristics of these local interactions between pixels, defining different regions of an image, can be modeled by a Markovian formalism, which is suitable for the envisaged framework of Bayesian data analysis. The MRF model characterize the spatial statistical dependency of 2-D data by symmetric set called neighbor set. The expression
∑ θr (xs+r + xs−r )
r∈ζ s
presents the sum of all the distinct cliques of neighboring pixels at a specific subband. For the first order model of MRF, a sum is performed over horizontal and vertical neighboring pixels. The neighbor set for a first model order is defined as ζ = {(0,1), (0,–1)(1,0), (–1,0)} and for a second model order ζ = {(0,1), (0,–1)(1,0),

(–1,0), (1,1), (–1,–1), (1,–1), (–1,1)}. The MRF model is defined for symmetric neighbor set, therefore, if r ∈ ζs then –r ∉ ζs and ζ is defined as ζ = (r : r ∈ ζs) [ (–r : r ∈ ζs). MRF can be described by potential functions working on a local neighborhood due to the Gibbs-Markov
equivalence. In principle, there are no restrictions to the contents of these potential functions. The potentials attached to different cliques do not even have to be stationary but can vary throughout the image. For the problem of image restoration or information extraction, however, a certain number of ”standard” potential functions exist. Local interactions can be described by potentials Vc for different cliques c. These potentials are a function of the gray-values of the pixels belonging to a clique. Hence, the global energy of the whole image can be written as the sum over all potentials














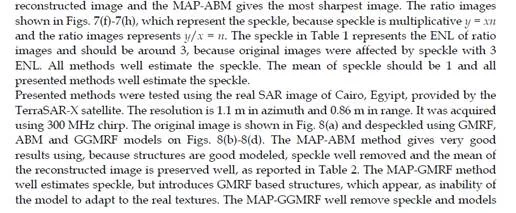


textures in the real-SAR image. Figs. 9(a)-9(c) show the ratio images of real SAR images. The speckle is well estimated with all presented methods. The MRF based methods are able to extract features parameters. In this case the texture can be extracted using texture models. The texture parameters obtained with the GMRF, ABM and GGMRF models are shown in Figs. 10(a)-10(f), where the horizontal and vertical cliques are shown. The ABM model well models homogeneous and heterogeneous regions, as well it separates different kind of textures, as show the ABM’s texture parameters on Figs. 10(c)- 10(d). The GMRF model is not as efficient as the ABM model in modeling real textures, but it is still able to model homogeneous and heterogeneous regions and the parameters estimated with the GMRF model are shown in Figs. 10(a)-10(b). The wavelet based method has difficulties in modeling textures. This can be the consequence of the linear model used for the texture parameter estimation. The texture parameters obtained with the GGMRF model are shown in Fig. 10(e)-10(f). The computational efficiency of the proposed methods were tested on real SAR image with 1024 ×1024 pixels and the execution times were 414, 560 and 103 seconds for MAP-GMRF, MAP-ABM and MAP-GGMRF methods.
Conclusion
Presented methods in this paper are based on Markov Random Fields. The efficiency of two methods, which work within the image domain and the wavelet based method is compared. The wavelet-based method gives good results in the objective measurements on simulated data, well preforms in the terms of despeckling, but its ability of information extraction in very poor. The ABM in GMRF based methods well despeckles the real and simulated dataand the ABM gives very good results using real SAR data. The ABM has better ability to separate blob-like textures, which occur in the real SAR images for city areas. The GMRF model is more appropriate for the natural textures.