Couplings are indispensable mechanical power transmission elements used for connecting shafts. Flexible couplings in particular are used in areas where misalignment needs to be accommodated (the flexibility is highly restricted based on the type of Elastomeric material used) and also to take up shock loads at the driven end, thus protecting the driving element like a motor or such.
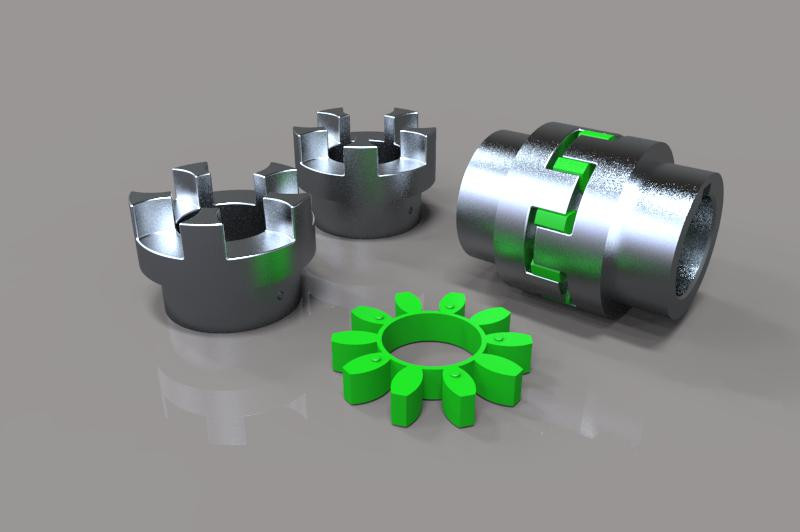
Jaw Type Couplings tend to have a flexible member or Elastomeric member between the two metal components. The flexible member is also called the “Spider.” The Spider material can be made from different types of rubber or plastic possessing varying degrees of hardness in order to suit the load carrying capacity of the system torsional characteristics.
The constructional features of the Jaw type coupling are shown below. The dimensional drawing as well as the nomenclature of the coupling is also enclosed.
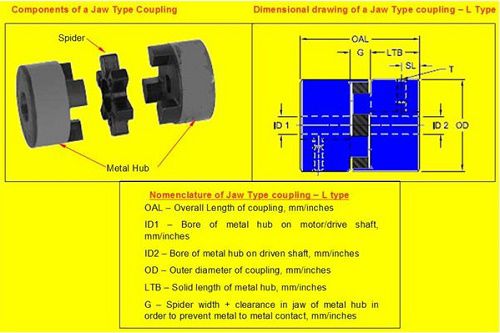
Here as some of the key aspects on the constructional features of the Jaw type coupling. These points are to be considered for the proper selection of a coupling.
– The metal hub is constructed of sintered iron, cast iron, or aluminium or stainless steel. The type of metal hub is mainly based on the area of operation of the coupling and its inertia aspects.
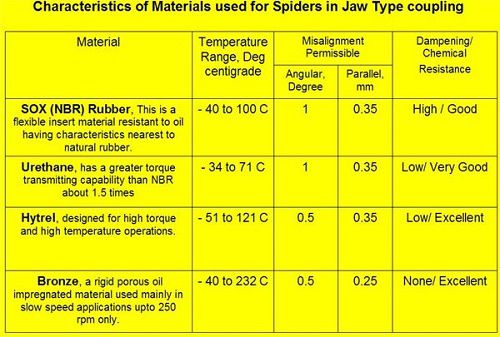
– The spider is normally made up of a nonmetallic element like rubber, urethane, hytrel because of their Elastomeric properties and in very rare cases bronze is used. A chart depicting the choices for various types of spider material is given below.
.
Now let us look into the calculation aspects for the selection of jaw type couplings.
Step 1: Determine the Nominal Torque of your application by using the following formula:
Nominal Torque = kW x 9550/r.pm at which the coupling is to run
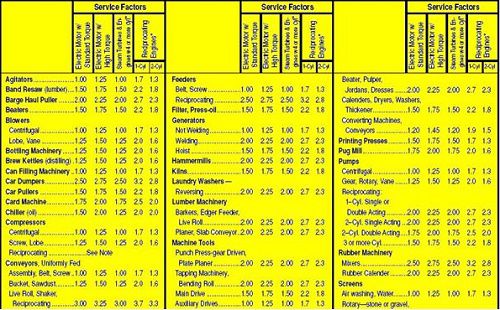
Step 2: Determine the application factor – The application area of the coupling is used to determine the application factor from a table as shown below. These factors can vary from manufacturer to manufacture based on the methodology of design, material used, etc. You may treat this as an example.
Step 3: Determine the design Torque: – The design torque is calculated using the following formula:
Design Torque = Application factor x Nominal Torque
Step 4: Selecting the Spider material: – The spider material needs to be selected based on the application for which it is to be used. Kindly refer the chart referring to the various types of reference for selection.
Step 5: Selecting the coupling based on the above calculated and application factor values: – The coupling is selected based on the design torque for the appropriate spider type, completing the selection of a jaw type coupling. A reference chart is shown below for you.

This is the basic methodology used for the selection of couplings. There are various types of jaw coupling which will be dealt in forthcoming articles.

