
The evolution of modern mechatronics can be illustrated with the example of the automobile. Until the 1960s, the radio was the only significant electronics in an automobile. All other functions were entirely mechanical or electrical, such as the starter motor and the battery charging systems. There were no “intelligent safety systems,” except augmenting the bumper and structural members to protect occupants in case of accidents. Seat belts, introduced in the early 1960s, were aimed at improving occupant safety and were completely mechanically actuated. All engine systems were controlled by the driver and/or other mechanical control systems. For instance, before the introduction of sensors and microcontrollers, a mechanical distributor was used to select the specific spark plug to fire when the fuel–air mixture was compressed. The timing of the ignition was the control variable. The mechanically controlled combustion process was not optimal in terms of fuel efficiency. Modeling of the combustion process showed that, for increased fuel efficiency, there existed an optimal time when the fuel should be ignited. The timing depends on load, speed, and other measurable quantities.
The electronic ignition system was one of the first mechatronic systems to be introduced in the automobile in the late 1970s. The electronic ignition system consists of a crankshaft position sensor, camshaft position sensor, airflow rate, throttle position, rate of throttle position change sensors, and a dedicated microcontroller determining the timing of the spark plug firings.
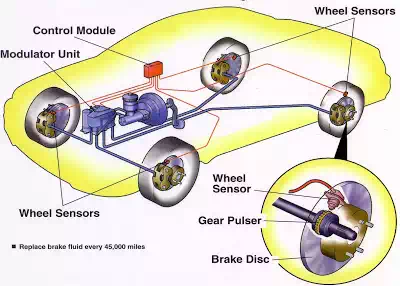
The Antilock Brake System (ABS) was also introduced in the late 1970s in automobiles. The ABS works by sensing lockup of any of the wheels and then modulating the hydraulic pressure as needed to minimize or eliminate sliding.
The Traction Control System (TCS) was introduced in automobiles in the mid-1990s. The TCS works by sensing slippage during acceleration and then modulating the power to the slipping wheel. This process ensures that the vehicle is accelerating at the maximum possible rate under given road and vehicle conditions.
The Vehicle Dynamics Control (VDC) system was introduced in automobiles in the late 1990s. The VDC works similar to the TCS with the addition of a yaw rate sensor and a lateral accelerometer. The driver intention is determined by the steering wheel position and then compared with the actual direction of motion. The TCS system is then activated to control the power to the wheels and to control the vehicle velocity and minimize the difference between the steering wheel direction and the direction of the vehicle motion . In some cases, the ABS is used to slow down the vehicle to achieve desired control. In automobiles today, typically, 8, 16, or 32-bit CPUs are used for implementation of the various control systems. The microcontroller has onboard memory (EEPROM/EPROM), digital and analog inputs, A/D converters, pulse width modulation (PWM), timer functions, such as event counting and pulse width measurement, prioritized inputs, and in some cases digital signal processing. The 32-bit processor is used for engine management, transmission control, and airbags; the 16-bit processor is used for the ABS, TCS, VDC, instrument cluster, and air conditioning systems; the 8-bit processor is used for seat, mirror control, and window lift systems. Today, there are about 30–60 microcontrollers in a car.
Micro Electromechanical Systems (MEMS) is an enabling technology for the cost-effective development of sensors and actuators for mechatronics applications. Already, several MEMS devices are in use in automobiles, including sensors and actuators for airbag deployment and pressure sensors for manifold pressure measurement. Integrating MEMS devices with CMOS signal conditioning circuits on the same silicon chip is another example of development of enabling technologies that will improve mechatronic products, such as the automobile.


{kind=link}
{kind=link}