Explicit dynamics analysis is the best tool for simulating high energy dynamic events that involve impact or shock loads. It can also be used to solve highly nonlinear static analyses that can’t be solved with implicit codes due to convergence problems. One of its drawbacks, however, is that it can cause very long run times for longer duration transients. Another drawback is that it is often considered to be restricted to meshes that only contain brick elements. Most commercial explicit codes do, in fact, support tetrahedral elements but analysts are often concerned about their accuracy and the long run times they can cause. If used wisely, however, they can produce reasonably accurate results without significantly increasing run time. And, in many cases, it’s much easier to create a tetrahedral mesh rather than spending significant resources trying to create an all-brick mesh.
When using tetrahedral elements in explicit dynamics, it’s critical to select the right element formulation. Most commercial explicit dynamics codes such as LS-Dyna, AUTODYN, andANSYS/Explicit include a number of different formulations. One of the most basic formulations is the degenerate brick element where the fourth through eighth nodes in the element are all the same. This formulation is known to be unstable and slow relative to true tetrahedral elements. One of the reasons for its instability is the fact that 5/8 of the element mass is concentrated at one location.
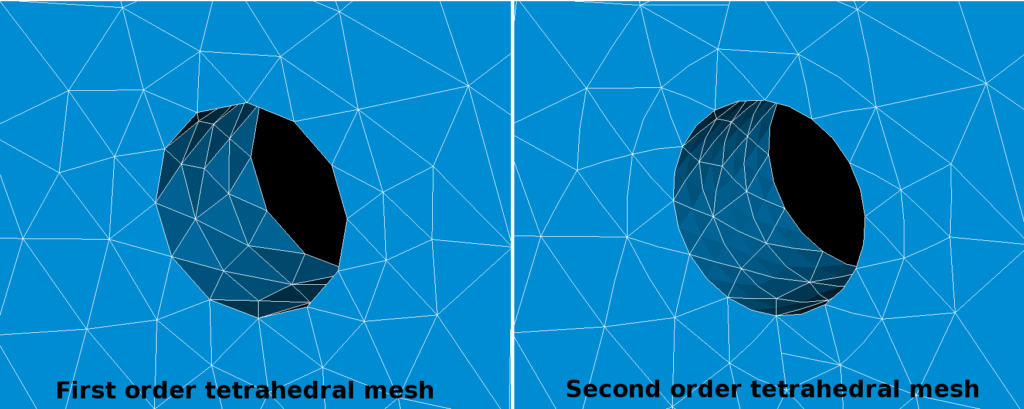
Another option is to use a 10-noded tetrahedral element. While this element can be accurate, it is very slow because the stability time step is half as big as a 4-noded tetrahedral element. Some typical 4-noded formulations include the following:
● Tetrahedron with 1-point integration
● Tetrahedron with 1-point integration and an average nodal pressure (ANP) scheme used to reduce volumetric locking
● Tetrahedron with selectively-reduced (SR) integration and rotational degrees of freedom
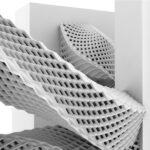
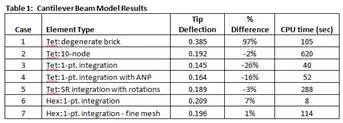
To demonstrate both the accuracy of these different formulations and their effect on run time, both a quasi-static cantilever beam model and a Taylor bar impact model were evaluated. The two different models are shown in Figure 1. The final tip deflection of the cantilever beam was compared to a theoretical solution for a beam in bending. These results are shown in Table 1. The column labeled as “% Difference” lists the difference in the tip deflection relative to the theoretical solution. With the exception of Case 7, all models used a similar element size. All hex (brick) model cases used perfect cube-shaped elements and hourglass control.
A few conclusions can be drawn from this study. First, the degenerate brick formulation is highly inaccurate and should be avoided. Furthermore, the 10-node tet and the tet with SR integration and rotational degrees of freedom are very slow but accurate. The two remaining tet formulations show a stiff response but are not grossly inaccurate with the ANP tet formulation showing more accuracy.
 |
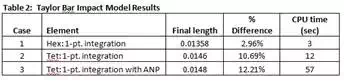
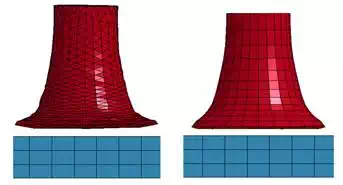
The Taylor bar impact model included an elastic-perfectly plastic material model in the cylinder. This cylinder was assigned an initial velocity and its final length was measured after impact with the plate. This length, which decreases considerably due to severe plastic deformation, was compared to the final length obtained from an actual impact test.
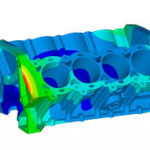
Results for these cases are shown in Table 2. They suggest that, as with the cantilever beam test results, the two 1-pt integration tetrahedral formulations exhibit a stiff response but the final cylinder lengths are not grossly different from that of the standard 1-point integration brick model. The final deformed shapes of the cylinders for the standard 1-point integration tet and brick element models are shown in Figure 2. As a side note, the considerably longer run time for the ANP tet element case (Case 3) was caused by severe element distortions during the run. A simulation with less deformation would likely show a smaller difference in run time.
In conclusion, if the element formulations are selected wisely, tetrahedral elements can be used to yield results in explicit dynamics models that are not grossly different from those obtained for standard 1-point integration brick models. While they yield longer run times, they can be combined with bricks in the same model to help facilitate meshing. Brick meshes are still more accurate, however, and should be used in those regions of the model where accuracy is critical.
 |
 |
 |